出处:Constar仓兴达 关键词:空心杯伺服电机,机器人手指电机 时间:2023-07-24
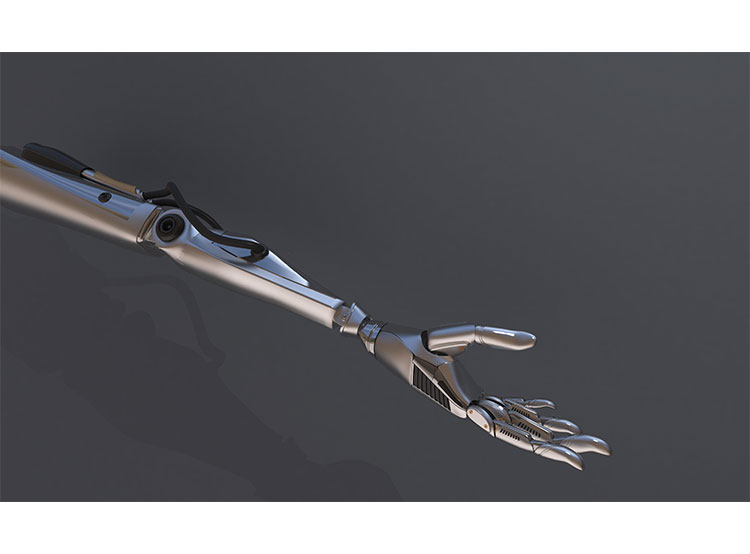
随着科技的发展以及社会生产对效率要求的提高,人形机器人产业近年来发展迅速,而机器人仿生手指的研发设计给工程师也带了了很多挑战。人形机器人的手指空间狭小,因此人形机器人的手指关节需要配备更多能够输出较大力量的小型化电机。微型空心杯伺服电机的空心杯电机、减速箱、编码器组合完美满足了人形机器人对手指关节轻量化和高精度的要求。

1、小型化设计:微型空心杯伺服电机具有紧凑的外观尺寸和轻巧的重量,这使得它们非常适合应用于机器人手指,因为手指通常需要较小且轻便的执行器。
2、高精度和高响应性:微型空心杯伺服电机通常采用高精度的位置和速度反馈系统,使得它们能够快速而准确地控制手指的位置和运动。这对于一些需要精确控制的任务非常重要,例如抓取脆弱的物体或执行精细的操作。
3、高扭矩密度:尽管微型空心杯伺服电机相对小巧,但它们通常具有相当高的扭矩密度,即单位体积内能输出较大扭矩。这使得它们能够在有限的空间内提供足够的力量来实现强力抓取或握持动作。
4、低能耗:由于其小尺寸和高效的设计,微型空心杯伺服电机在运行时通常具有较低的能耗,这有助于延长机器人手指的使用时间,特别是在电池供电的情况下。
5、低噪音运行:许多微型空心杯伺服电机采用了优化设计,以减少噪音产生。这对于一些对噪音敏感的应用场景,如在办公室或医院等环境中使用机器人手指,尤为重要。
总体而言,微型空心杯伺服电机在机器人手指上的应用特点使得机器人能够更加灵活、精准地执行各种任务,尤其是需要细致操作和较小尺寸的场景。它们在现代机器人技术中发挥着重要作用,不断推动着机器人在各个领域的应用和发展。


扫码关注我们
Copyright © 深圳市仓兴达科技有限公司 2015 All rights reserved 粤ICP备09218001号